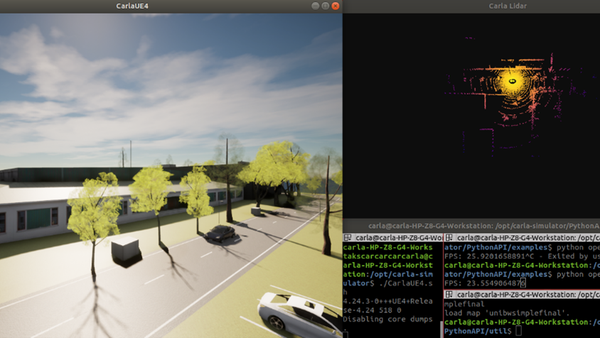
Emulation of a LiDAR/IMU Navigation Solution for an Asteroid Lander Using a Multicopter
In the field of deep space exploration, sending probes to planets, moons and asteroids are getting more attention in order to understand the origin of the universe, the assessment of possible existence of forms of life –apart from those on the Earth–, and the possibility of establishing colonies in the solar system. One crucial task of those spacecraft is to ensure the autonomy of operating in the vicinities of those celestial bodies. Hence, we are proposing a new concept for autonomous navigation of an asteroid lander.