Unsere Professur, unter der Leitung von Univ.-Prof. Dr.-Ing. Bassam Alrifaee, ist auf die Planung und Regelung spezialisiert, wobei ein besonderer Fokus auf Multi-Agenten-Systemen liegt. Unsere Forschungsschwerpunkte umfassen verteilte prädiktive Regelung, dienstorientierte Softwarearchitekturen, Lokalisierungssysteme und Anwendungen auf vernetzte und automatisierte Fahrzeuge.
Wir haben es uns zum Ziel gesetzt nicht nur zur Sicherheit und Leistung autonomer Systeme, sondern auch zu ihrem positiven Umwelteinfluss beizutragen. Finanziert durch öffentliche Organisationen und industrielle Partner, sind wir in verschiedenen Projekten in diesem dynamischen Forschungsbereich engagiert. Wir begrüßen Vielfalt und Inklusion und erkennen an, dass vielfältige Perspektiven und Hintergründe wichtig sind, um unsere Forschungsziele voranzutreiben. Darüber hinaus fördern wir Bildung und tragen aktiv zur Lehre bei. Mit diesem vielschichtigen Ansatz streben wir danach, eine Umgebung zu schaffen, die herausragende Forschung und exzellente Lehre vereint.
Projekte
Diensteorientierte modellbasierte Regelung (gefördert von der DFG)
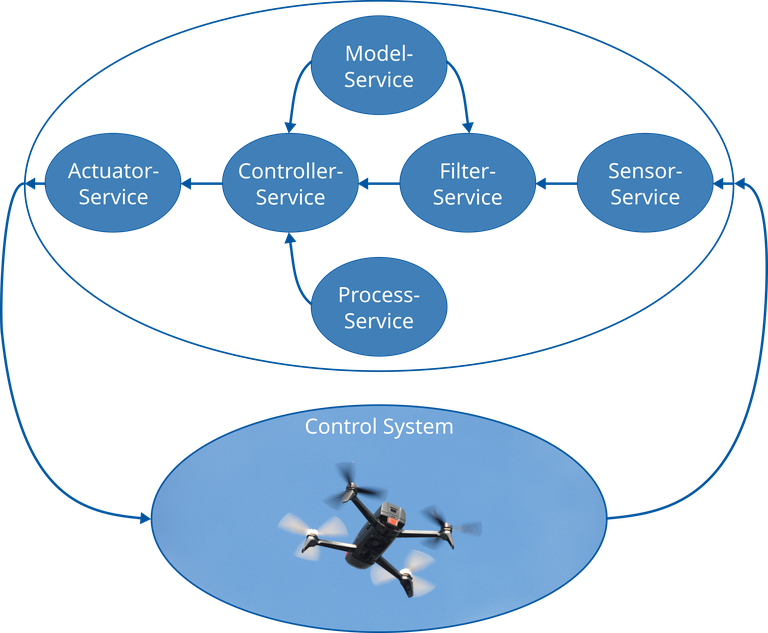
Zusammen mit dem Institut für Regelungstechnik der RWTH Aachen University forschen wir an dem Projekt „Dienstorientierte modellbasierte Regelung“ (engl. Service-Oriented Model-based Control, SOMC), welches durch die Deutsche Forschungsgemeinschaft (DFG) gefördert wird. Dabei soll eine Architektur entwickelt werden, die auf die Anforderungen eingebetteter Regelungssysteme zugeschnitten ist und die erforderliche Flexibilität ermöglicht. Diese ermöglicht einen dynamischen Austausch von regelungstechnischen Komponenten zur Laufzeit, sodass auf Situationen des zu regelnden Systems reagiert werden kann, welche während der Entwicklung nicht berücksichtigt wurden.
Digital Twin of the Road System (gefördert von der DFG)
Als Teil des Sonderforschungsbereichs/Transregio (SFB/TRR) 339 der Deutschen Forschungsgemeinschaft (DFG) arbeiten wir an der Erstellung eines digitalen Abbilds zukünftiger Straßensysteme zur Analyse und Optimierung der Straßeninfrastruktur.
Die Forschung vereint Bauingenieurwesen, Informatik und Maschinenbau und konzentriert sich auf die intelligente und nachhaltige Nutzung der Straßen. Wir befassen uns vor allem mit der kooperativen Sensordatenfusion, die Daten aus verschiedenen Quellen, insbesondere aus einer sensitiven Straßendeckschicht, integriert. Dadurch wird die Positionierungsgenauigkeit von Verkehrsteilnehmern verbessert und der Erfassungsbereich der Straßendeckschicht erweitert. Dies leistet einen wichtigen Beitrag sowohl zum digitalen Zwilling der Straße als auch zur kooperativen Lokalisierungstechnologie.
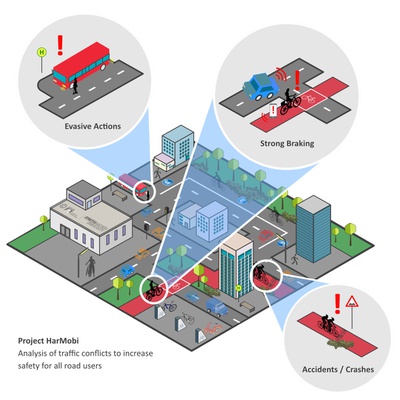
In Zusammenarbeit mit zwei Industriepartnern erforscht das ProjektHarMobi (Harmonizing Mobility) unter der Koordination der RWTH Aachen University, wie Konflikte zwischen verschiedenen Verkehrsteilnehmern wie Fahrradfahrern, E-Scooter-Nutzern und Autofahrern analysiert und bewertet werden können.
Ziel von HarMobi ist es, eine neue Bewertungsgrundlage für Konflikte im Straßenverkehr zu schaffen. Dazu werden Sensor- und Verkehrsflussdaten genutzt, um das Verhalten der Verkehrsteilnehmer und den Einfluss der Infrastruktur zu untersuchen. Diese Daten werden in ein lernendes System eingespeist, um die Sicherheitsauswirkungen auf zukünftige Verkehrsentwicklungen besser einschätzen zu können.
Wir entwickeln die Algorithmen für die Datenerfassung, die Bewertung kritischer Situationen und das Map-Matching. Zusätzlich erforschen wir die Ursachen von Konflikten und erstellen ein Prognosemodell. In der Fokusregion Aachen wird die Methode zur Erfassung sicherheitskritischer Ereignisse getestet und die Allgemeingültigkeit der Ergebnisse überprüft.
Multi-Agent Reinforcement Learning (MARL) für CAVs
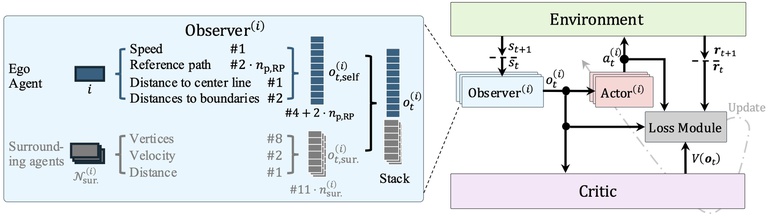
Unser SigmaRL ist ein offenes, dezentralisiertes Framework, das darauf ausgelegt ist, sowohl die Sample-Effizienz als auch die Generalisierungsfähigkeit von Multi-Agent Reinforcement Learning (MARL) für die Bewegungsplanung vernetzter automatisierter Fahrzeuge (engl. CAVs) zu verbessern. Konventionelle RL-Agenten neigen dazu, sich stark auf bestimmte Szenarien einzustellen und zeigen dadurch eine eingeschränkte Generalisierungsfähigkeit. Um diese Limitation zu überwinden, schlagen wir fünf Strategien zur Konstruktion informationsdichter Beobachtungen vor. Diese Strategien fokussieren sich auf generelle Merkmale, die in vielfältigen Verkehrsszenarien vorkommen. Durch diese Ansätze ist SigmaRL in der Lage, eine Zero-Shot-Generalisierung auf zuvor unbekannten Umgebungen zu erreichen – also auf Szenarien zu generalisieren, die während des Trainings nicht gesehen wurden.
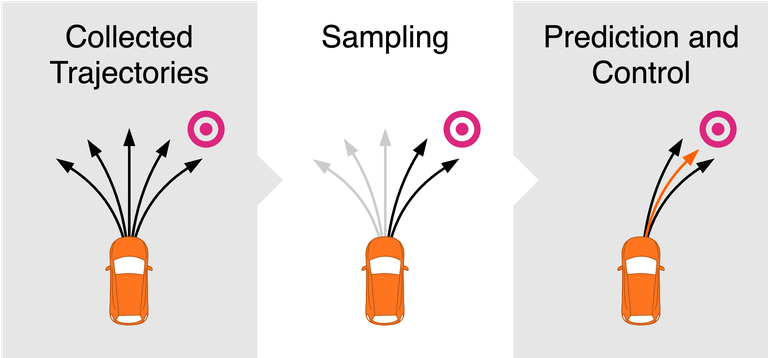
Data-Driven Predictive Control (DPC) für Robotische Systeme
Wir entwickeln datengetriebene prädiktive Regelungsmethoden für robotische Systeme, bei denen Regler direkt aus Daten lernen, anstatt sich ausschließlich auf mathematische Modelle zu stützen. Unser Fokus ist die Auswahl und Strukturierung der relevantesten Trajektorien durch Vorverarbeitung und Sampling, um auch bei komplexen und unsicheren Dynamiken präzise Vorhersagen und verlässliche Regelung zu ermöglichen. Unser Ziel ist es DPC näher an praxisnahe Anwendungen zu bringen.