Our lab, led by Univ.-Prof. Dr.-Ing. Bassam Alrifaee, specializes in intelligent control of autonomous systems, with a particular focus on multi-agent systems. Our research spans distributed predictive control, service-oriented software architectures, localization systems, and applications to connected and automated vehicles (CAVs).
We strive to contribute not only to the safety and performance of these systems but also to their environmental impact. Funded by public organizations and industrial partners, we engage in various projects in this dynamic research area. Embracing diversity, equity, and Inclusion, we recognize that multiple, different perspectives and backgrounds are important for advancing our research goals. Additionally, our commitment extends to education, and we actively value and contribute to teaching. Through this multifaceted approach, we aim to foster a holistic environment that integrates cutting-edge research, diversity, and educational excellence.
Projects
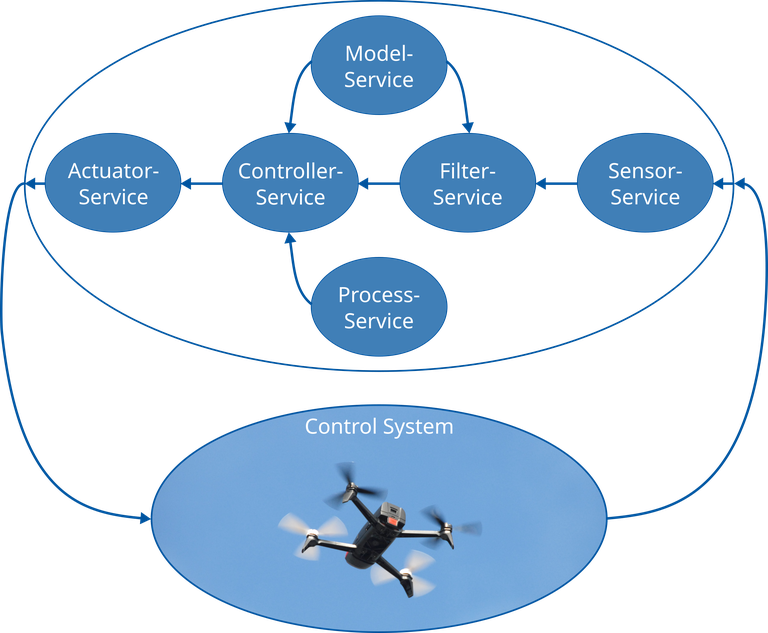
Service-Oriented Model-based Control (SOMC) (funded by the German Research Foundation)
Together with the Institute of Control Engineering at RWTH Aachen, we are researching research on the project Service-Oriented Model-based Control (SOMC), which is funded by the German Research Foundation (DFG). Our goal is to develop an architecture tailored to the requirements of embedded control systems while providing the necessary flexibility. This architecture will enable the dynamic exchange of control components at runtime, allowing the system to respond to situations that were not considered during the development phase.
In the Collaborative Research Center/Transregio (SFB/TRR) 339 of the German Research Foundation (DFG) we create a digital twin of future road systems for the analysis and optimization of road infrastructure.
The research brings together researchers from civil engineering, computer science, and mechanical engineering, focusing on the intelligent and sustainable use of roads. Our project with the SFB/TRR 339 primarily addresses cooperative sensor data fusion, which integrates data from various sources—particularly from a sensitive road surface layer. This enhances the positioning accuracy of road users and extends the detection range of the road surface. The research makes a significant contribution both to the road’s digital twin and to cooperative localization technology.
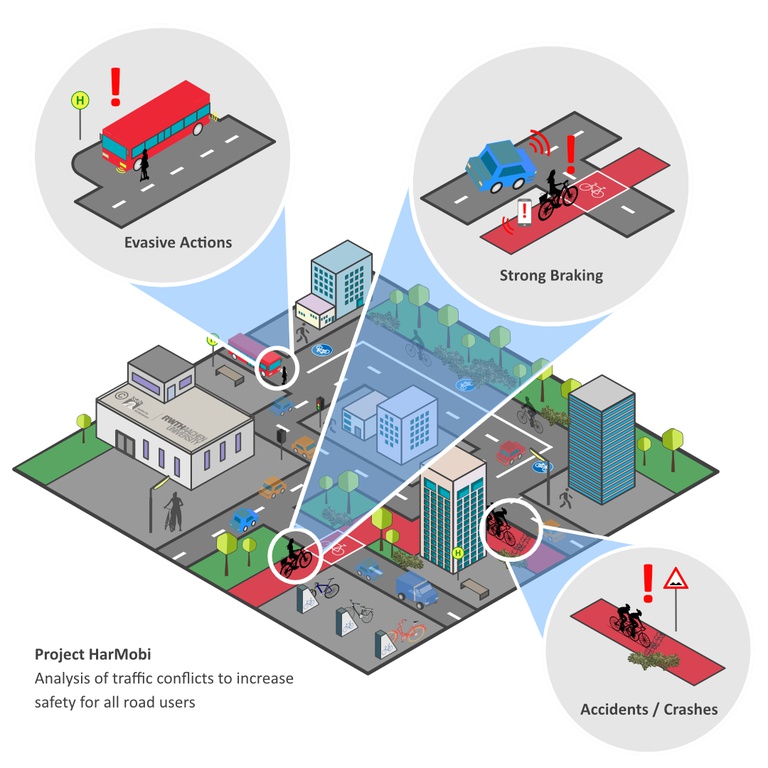
In collaboration with two industrial partners, the project HarMobi (Harmonizing Mobility), coordinated by RWTH Aachen University, is investigating how conflicts between different road users—such as cyclists, e-scooter users, and drivers—can be analyzed and assessed.
The aim of HarMobi is to establish a new basis for evaluating conflicts in road traffic. Sensor and traffic flow data are used to study the behavior of road users and the influence of infrastructure. These data are fed into a learning system to better assess the safety impacts of future developments in mobility.
We are developing the algorithms for data collection, critical situation assessment, and map matching. In addition, we are researching the causes of conflicts and creating a prediction model. In the Aachen focus region, the method for detecting safety-critical events is being tested, and the generalizability of the results is being evaluated.
Multi-Agent Reinforcement Learning (MARL) for CAVs
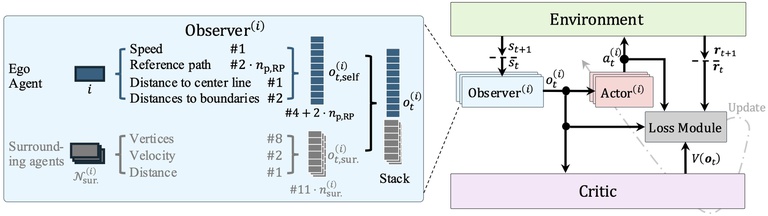
Our SigmaRL is an open-source, decentralized framework designed to improve both the sample efficiency and generalization of MARL for motion planning of CAVs. Conventional RL agents often have limited generalization capabilities, tending to overfit to specific scenarios. To address this limitation, we propose five strategies for constructing information-dense observations that emphasize general features common across diverse traffic scenarios. These strategies enable SigmaRL to achieve zero-shot generalization to previously unseen environments during training.
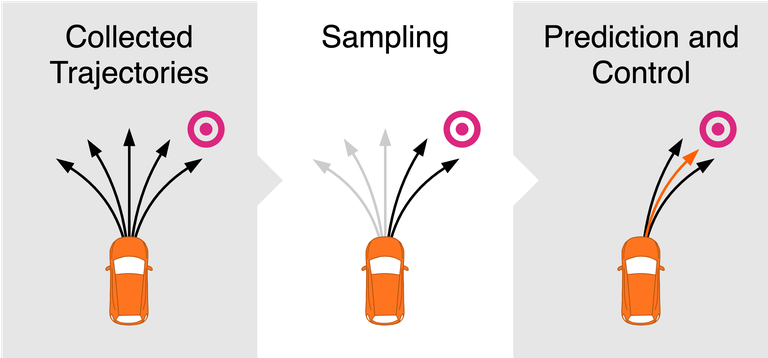
Data-Driven Predictive Control (DPC) for Robotic Systems
We develop data-driven predictive control methods for robotic systems, where controllers learn from data instead of relying solely on mathematical models. Our work focuses on how to select and structure the most relevant trajectories through preprocessing and sampling data, enabling accurate prediction and reliable control even under complex and uncertain dynamics. We aim to bring DPC closer to practical real-world applications.